日本初の月面着陸に20日未明に挑む探査機「SLIM(スリム)」に、身近なおもちゃをヒントに開発された超小型ロボットが搭載されている。「小型で軽くてシンプルな設計」を追い求めてきたおもちゃ職人の技が宇宙を舞台にしたプロジェクトに役立った。
SLIM JAXAなどが開発した無人の小型月着陸機。小型自動車ほどの大きさの縦1.7メートル、横2.7メートル、高さ2.4メートル。目標地点との誤差を100メートル以内にするピンポイント着陸を目指す。2023年9月に打ち上げられた。月面着陸が成功すれば日本初。旧ソ連、米国、中国、インドに次ぐ5カ国目となる。
◆20日未明に日本初の月面着陸なるか、その姿を撮影

月面をイメージした砂場に着地した状態の「SORAーQ」
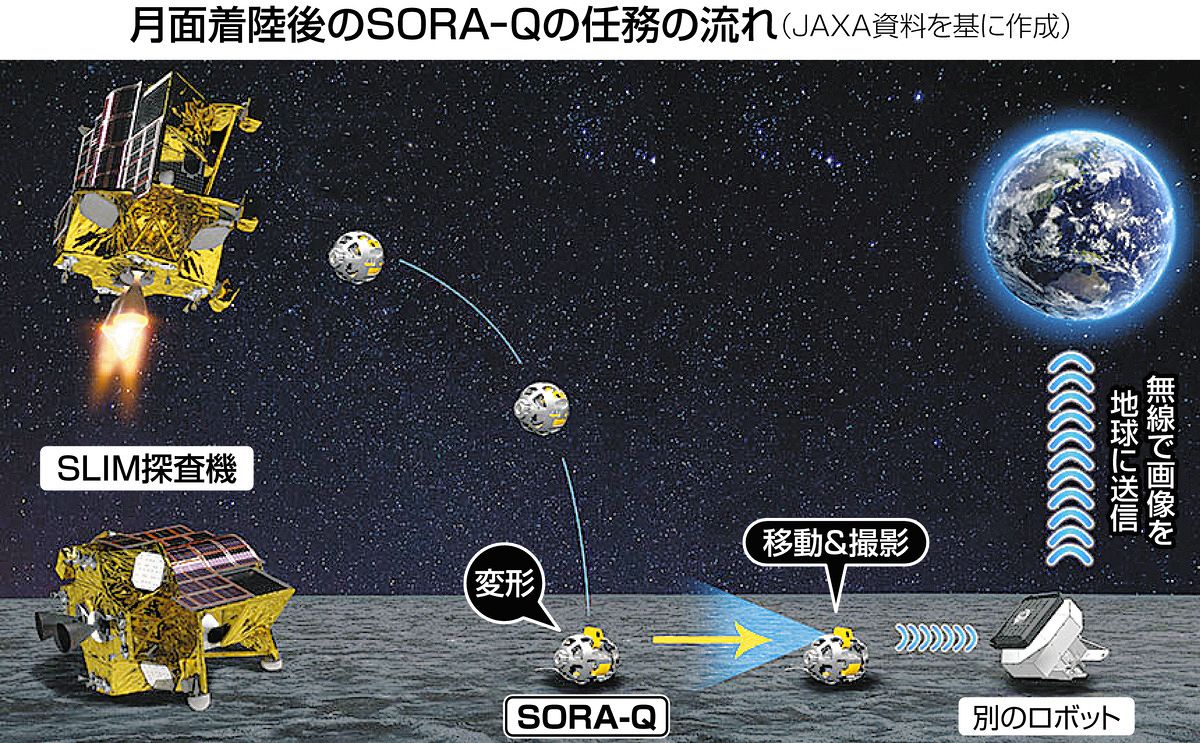
ロボットの愛称は「SORAーQ(ソラキュー)」。着陸が成功した証しを記録するカメラマン役を務める。大きさは直径8センチと見た目は野球ボールのような形。月面まで残り2メートルの位置で探査機から放り出され、月面で左右に開き、走行モードに一瞬で変形する。カメラが上部に飛び出し、月面を動きながら、着陸した探査機の姿を撮影する。
月までの輸送コストを考えると、できるだけ小さい方がいい。どうしたら砂場のような月面で足を取られずに進めるか―。研究チームは開発で壁にぶつかった。それを越えるきっかけとなったのが、「トランスフォーマー」など子どもたちに愛されてきた「変形する」おもちゃの存在だった。
◆「何千体もの変形を研究してきた蓄積ある」
ソラキュー開発の中心となった玩具メーカー「タカラトミー」(東京都葛飾区)では、こんな声が突破口を開いた。

SORAーQ開発のヒントになった、タカラトミー社の「トランスフォーマー」(動画よりスクリーンショット)
「思い切って変形させたらどうか」
外殻を車輪にすれば、部品を増やさずに済む。映画にもなったおもちゃ「トランスフォーマー」などを開発してきた経験が生きた。開発チームの赤木謙介さん(42)は「何千体もの変形を研究してきた蓄積があるので、少ない動作で変形させることができた」と語る。

月面をイメージした砂場に着地し、走行モードに変形する「SORAーQ」
変形後の走行に立ちはだかったのが、月の表面を覆う「レゴリス」と呼ばれる砂。ベテラン技術者の米田陽亮(ようすけ)さん(63)は「砂の粒が細かいのでタイヤで走らせたら身動きできなくなってしまった」と振り返る。チームはウミガメの歩き方をヒントに、動物や恐竜をモデルにした自社のおもちゃ「ゾイド」の歩行技術を応用することにした。
◆「おもちゃ会社で宇宙事業に関わるなんて」
ゾイドの迫力ある歩行は、回転軸を中心からずらす偏心軸で表現している。ソラキューも偏心軸にしてみると、水泳のバタフライのように体を持ち上げながら力強く進めるようになり、砂の凹凸や傾斜を乗り越えられるようになった。
SORAーQの開発秘話を話すタカラトミーの米田陽亮さん(右)と赤木謙介さん
2016年から共同研究を始めた宇宙航空研究開発機構(JAXA)によると、重さが数十キロあった従来の探査車に比べ、ソラキューは250グラムと超軽量を実現した。全く異なる分野の知見が功を奏し、主任研究開発員の平野大地さんは「変形するのはユニーク。偏心軸の探査車も(発想が)新しい」と期待する。
ソラキューが撮影した写真は別のロボットを経由して地球に送られ、火星探査など今後の宇宙開発の資料となる。
関連キーワード
おすすめ情報
からの記事と詳細 ( 【動画】月面で超軽量カメラが自走する!? タカラトミーが開発 「トランスフォーマー」の技術で実現へ:東京新聞 ... - 東京新聞 )
https://ift.tt/Hprchl7
No comments:
Post a Comment